The ROLA app allows pet owners to remotely monitor and interact with their pets through a mobile-controlled robot. While the system provides strong real-time feedback and responsive control, inconsistencies in conceptual modeling, task organization, and emotional framing introduce subtle friction in what should be a reassuring experience.

ROLA is a mobile interface designed to control a companion robot that enables remote monitoring and interaction with pets. As a user interacting with the system in real conditions, I observed that while the app functions reliably, its structure sometimes prioritizes features over user intention. Using concepts from Don Norman’s The Design of Everyday Things, I analyze how feedback, mapping, conceptual models, and emotional design shape the experience.
1. Visibility of System State and Real-Time Feedback (Strong)
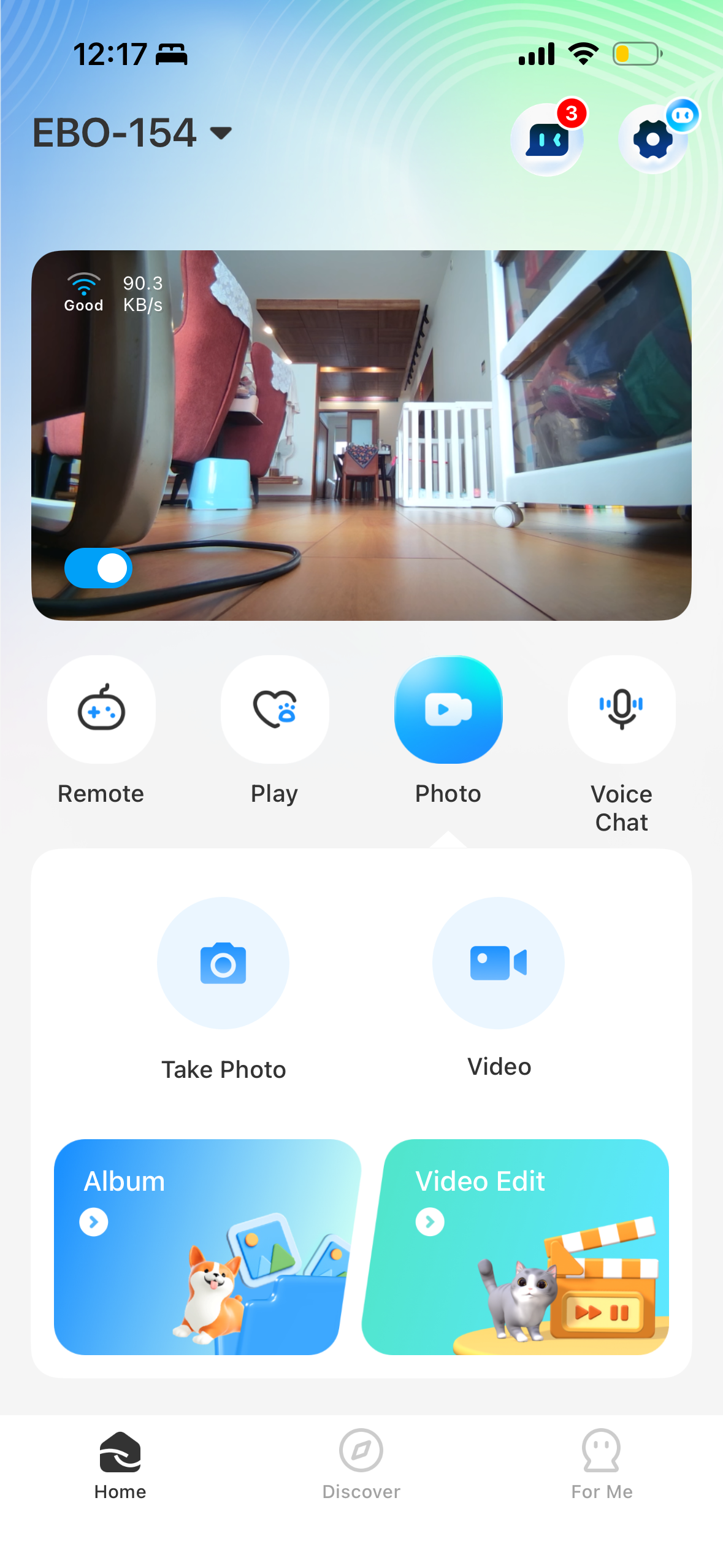
The live video stream immediately communicates the robot’s operational state. Signal strength and connection speed indicators further reinforce system transparency. This demonstrates strong visibility of system state, a key Norman principle.
Because the robot’s movement corresponds directly with on-screen controls, the mapping between input and physical output is clear. The robot responds instantly to directional commands, minimizing the gulf of execution. Users do not struggle to translate intention into action.
This behavioral-level responsiveness strengthens trust in the system.
2. Conceptual Model Misalignment: Features vs. Intentions (Problem)
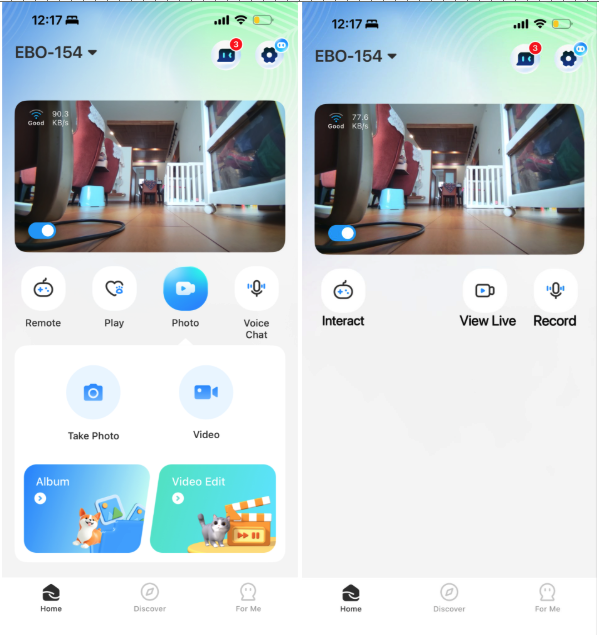
The main navigation is organized around the following features: Remote, Play, Photo, and Voice Chat. While each label is clear as a tool, the structure reflects the system model rather than the user’s mental model.
The user’s likely goals are task-oriented:
- Check on my pet
- Interact briefly
- Reassure myself
However, the interface requires users to choose among functional categories before achieving their emotional goal. This indicates a mismatch between the system model and the user’s conceptual model.
Norman argues that when these models diverge, friction emerges. In this case, the user must interpret which feature corresponds to their intention, slightly increasing the gulf of execution.
Improvement
The home interface could reorganize around task-based prompts such as:
- “View Live”
- “Interact”
- “Record”
This reframing would align the conceptual model with user intention, reducing interpretive effort.
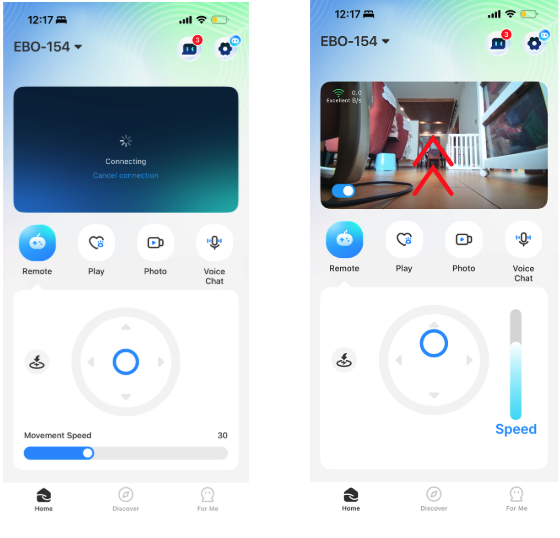
3. Control Density and Mapping Complexity (Cognitive Load Issue)
The directional control and speed adjustment are presented as separate elements. While individually logical, their relationship is not visually integrated.
Norman emphasizes that good mapping makes relationships perceptually obvious. Here, the user must cognitively connect speed settings with movement behavior.
Improvement
Embedding dynamic speed feedback within the joystick interface, such as a responsive visual indicator that changes as speed increases, would strengthen mapping. This would make the cause-and-effect relationship more perceptually immediate.
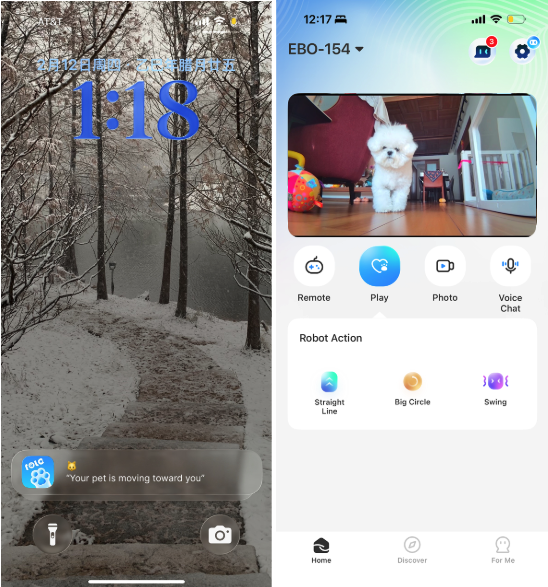
4. Emotional Design: Functional but Under-Expressed
On a visceral level, the interface feels soft and approachable, consistent with a pet-centered product. On a behavioral level, the system performs reliably.
However, on a reflective level, the experience prioritizes mechanical control over emotional reassurance. For a product centered on companionship, this is a missed opportunity.
Subtle additions, such as contextual status messages (“Your pet is moving toward you” or “Interaction successful”), would strengthen reflective meaning without increasing complexity.
Conclusion
The ROLA app successfully implements strong feedback and clear mapping between digital input and physical movement. However, its feature-based structure and limited emotional framing create friction within the user’s conceptual model.
By reorganizing around user intention and reinforcing emotional cues, the system could better align the user model and system model, minimizing both the gulf of execution and the gulf of evaluation.